Contents
function q3_solution
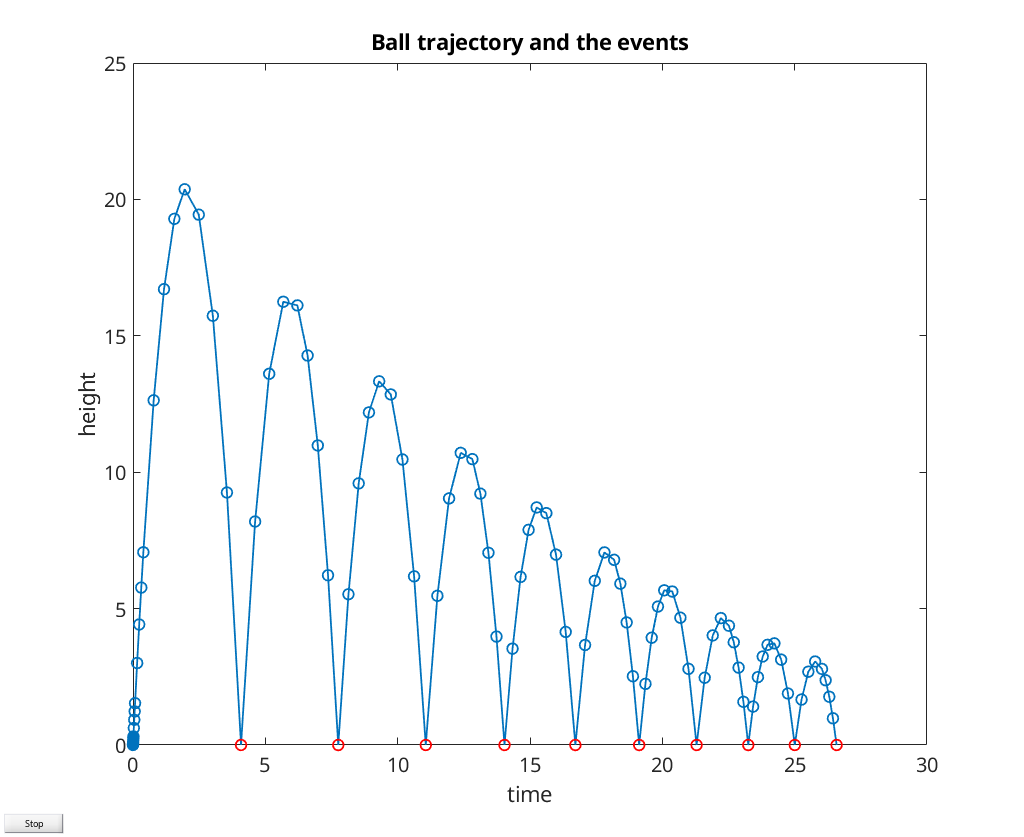
Test simulations, with various values of coefficient ( )
)

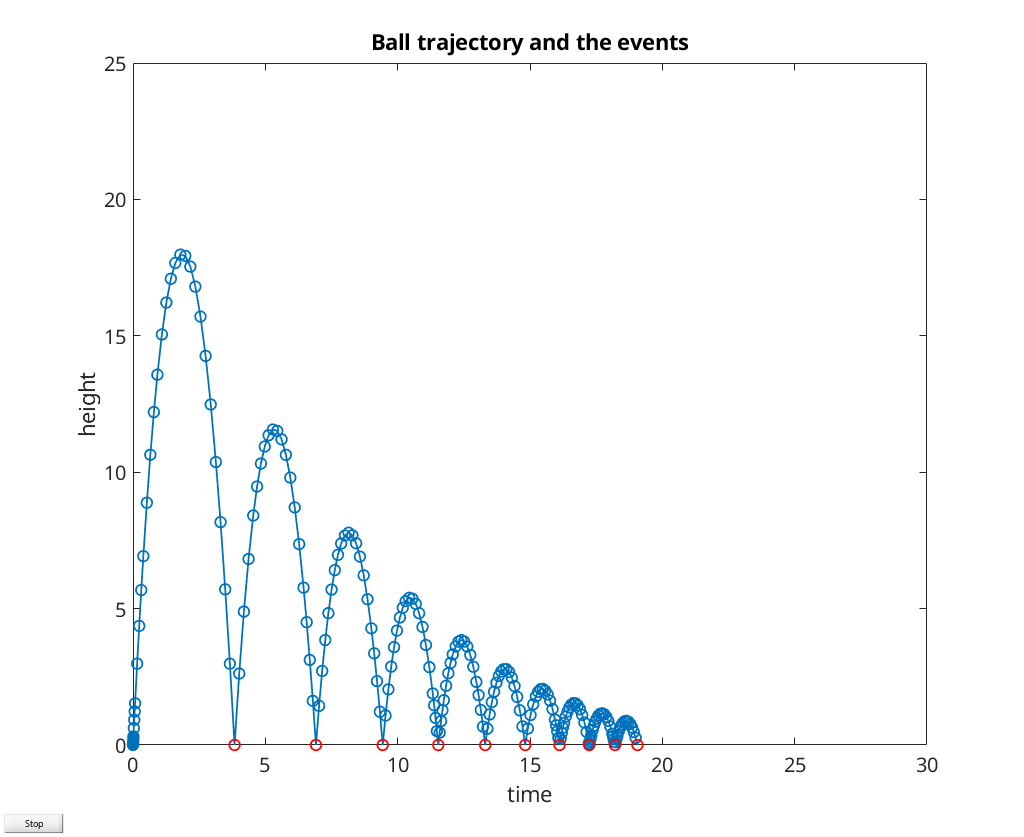
ballode_withfriction(0.1)

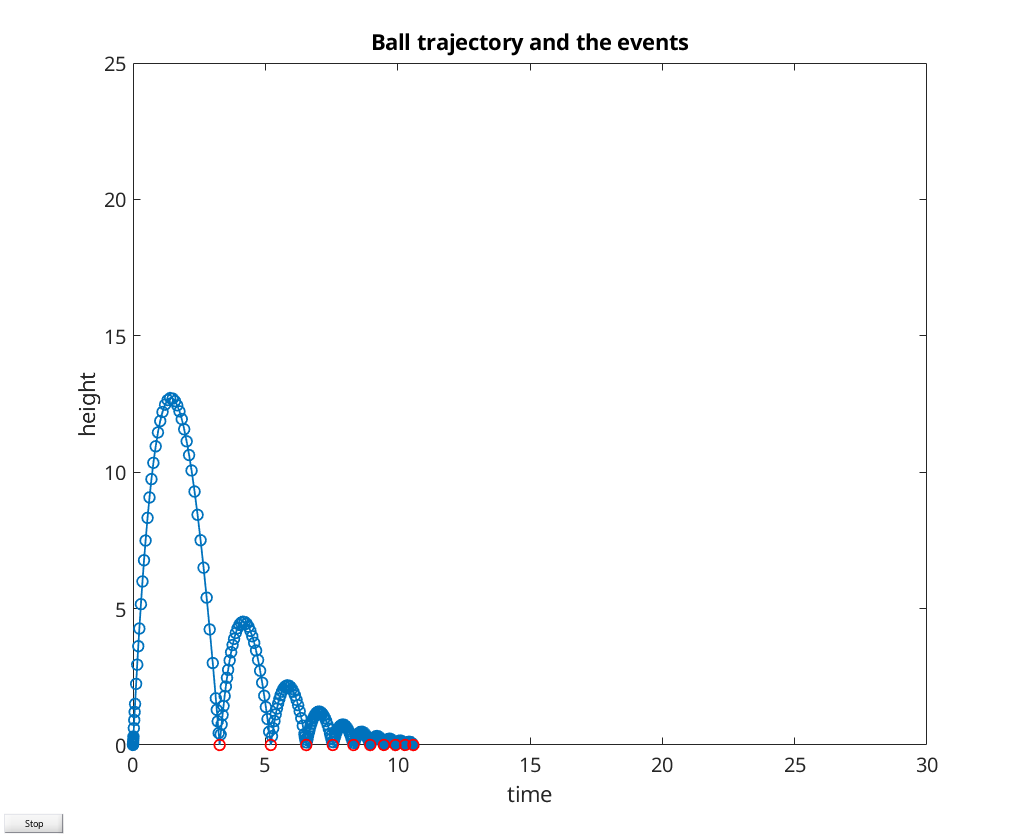
ballode_withfriction(0.47)

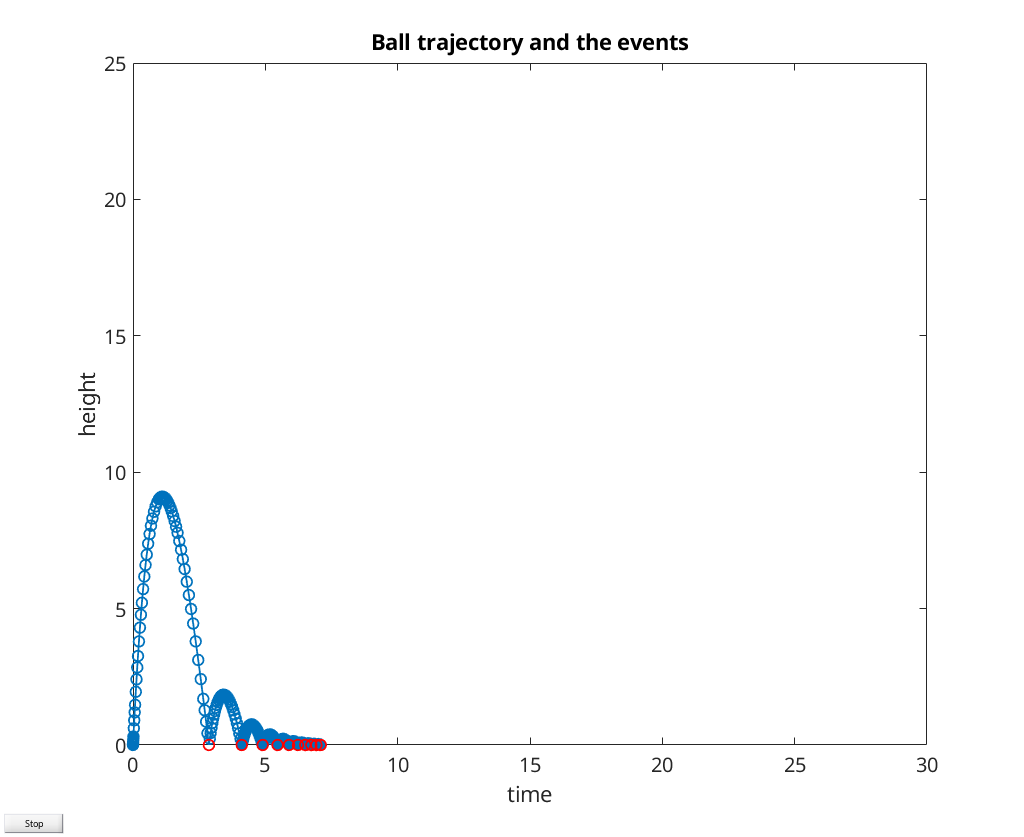
ballode_withfriction(1)

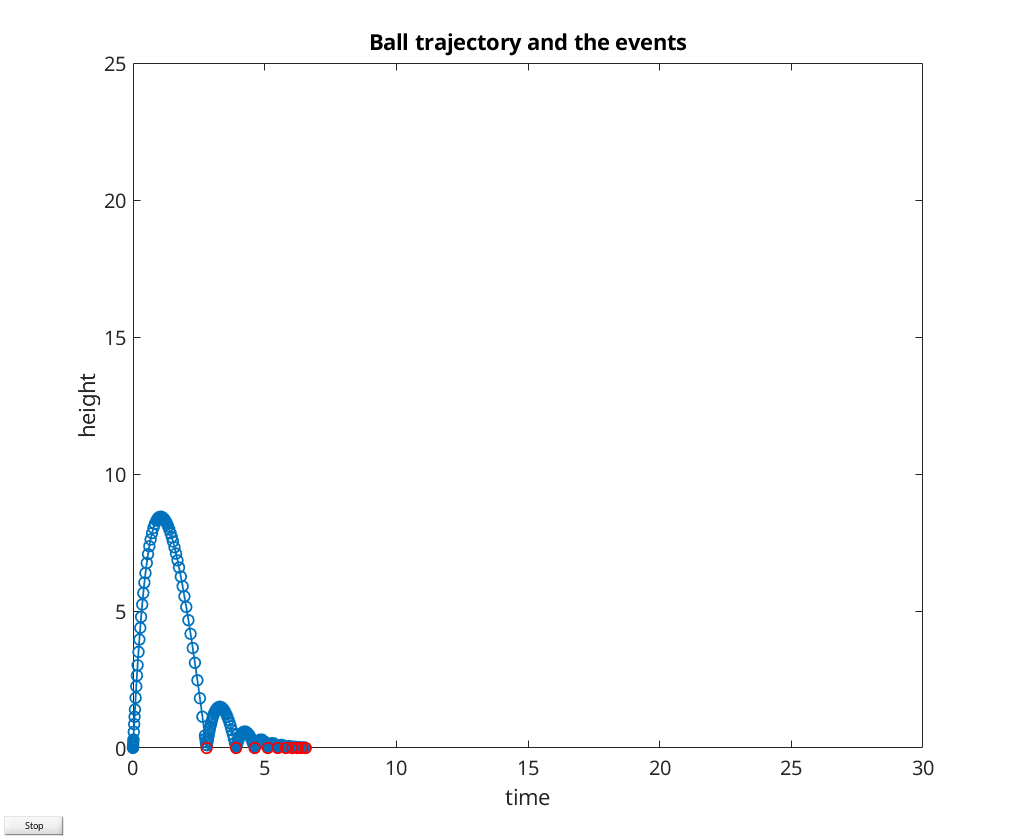
ballode_withfriction(1.15)
 (No friction)
(No friction)
ballode_withfriction(0)
end
Dynamical Friction Simulation Script
Modification of BALLODE with handle dynamical friction
function ballode_withfriction(a) %BALLODE_WITHFRICTION Run demo of a bouncing ball with dynamical friction % % Parameter: a - The coefficient for the dynamical friction % % Modification for dynamical friction of BALLODE by % Mark W. Reichelt and Lawrence F. Shampine, 1/3/95 tstart = 0; tfinal = 30; y0 = [0; 20]; refine = 4; options = odeset('Events',@events,'OutputFcn',@odeplot,'OutputSel',1,... 'Refine',refine); fig = figure; ax = axes; ax.XLim = [0 30]; ax.YLim = [0 25]; box on hold on; tout = tstart; yout = y0.'; teout = []; yeout = []; ieout = []; for i = 1:10 % Solve until the first terminal event. [t,y,te,ye,ie] = ode23(@(t,y)[y(2); -9.8-a*y(2)],[tstart tfinal],y0,options); if ~ishold hold on end % Accumulate output. This could be passed out as output arguments. nt = length(t); tout = [tout; t(2:nt)]; yout = [yout; y(2:nt,:)]; teout = [teout; te]; % Events at tstart are never reported. yeout = [yeout; ye]; ieout = [ieout; ie]; ud = fig.UserData; if ud.stop break; end % Set the new initial conditions, with .9 attenuation. y0(1) = 0; y0(2) = -.9*y(nt,2); % A good guess of a valid first timestep is the length of the last valid % timestep, so use it for faster computation. 'refine' is 4 by default. options = odeset(options,'InitialStep',t(nt)-t(nt-refine),... 'MaxStep',t(nt)-t(1)); tstart = t(nt); end plot(teout,yeout(:,1),'ro') xlabel('time'); ylabel('height'); title('Ball trajectory and the events'); hold off odeplot([],[],'done'); end % -------------------------------------------------------------------------- function [value,isterminal,direction] = events(t,y) % Locate the time when height passes through zero in a decreasing direction % and stop integration. value = y(1); % detect height = 0 isterminal = 1; % stop the integration direction = -1; % negative direction end